
각국 연구팀 ‘튜너봇’ ‘아그나타X’ 개발
‘튜너봇’ 인공 힘줄로 자세제어 가능
‘아그나타X’ 칠성장어 신경체계 모방
‘수중 드론’ 기초연구로 활발히 진행
미국 버지니아대 제공
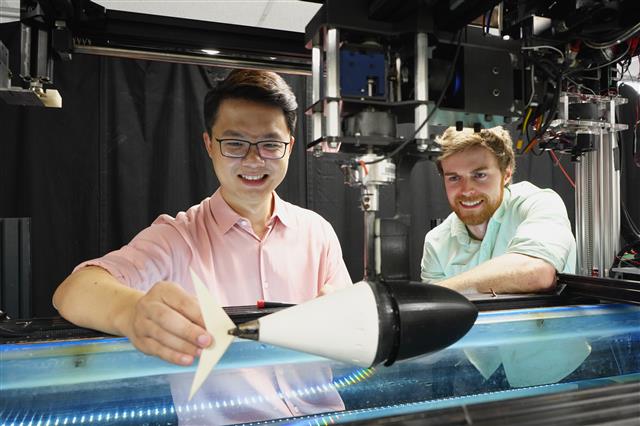
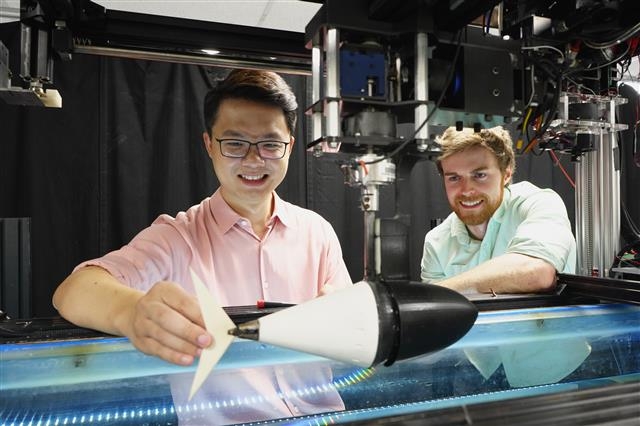
버지니아대 기계항공우주공학과 퀴안 종(왼쪽) 박사와 대니얼 퀸(오른쪽) 교수가 로봇 물고기 ‘튜너봇’으로 실험을 하는 모습.
미국 버지니아대 제공
미국 버지니아대 제공
외국에서는 물고기 구조와 기능을 분석한 생체역학, 유체역학, 수학적 모델링 등을 이용해 체계적인 로봇 물고기 개발에 나서고 있다. 한국에서처럼 말도 안 되는 황당한 목적이 아니라 에너지를 적게 쓰고 빠르게 움직일 수 있는 자율무인잠수정(수중드론)이나 수중이동체 효율을 높이기 위한 기초 연구로 진행하고 있는 것이다. 세계적인 과학저널 ‘사이언스’에서 발행하는 로봇공학 분야 국제학술지 ‘사이언스 로보틱스’ 8월 12일자에는 이런 다양한 로봇 물고기 연구개발 결과들이 실렸다.
현재까지 개발된 로봇 물고기나 수중드론은 정해진 속도로만 이동하고 속도 조절이 가능해 속도를 높이거나 늦출 경우 자세 제어가 잘 되지 않는다는 게 단점이다. 연구자들은 물고기들처럼 빠른 속도로 좁은 장소나 장애물을 효과적으로 빠져나가거나 상황에 따라 속도를 변화시키면서 안정적으로 이동할 수 있는 해법을 찾기 위해 다양하게 접근하고 있다.
우선 미국 버지니아대 기계·항공우주공학과, 웨스트체스터대 생물학과 공동연구팀은 참치에서 해법을 찾았다. 연구팀은 참치 꼬리지느러미 구조 및 움직임 분석과 생체역학, 유체역학 모델링을 바탕으로 로봇 참치 ‘튜너봇’을 개발했다. 연구팀은 참치 꼬리지느러미를 수학적으로 분석한 결과 꼬리 강성과 수영 속도가 비례 관계에 있다는 사실을 밝혀냈다. 이에 연구팀은 로봇 물고기에 인공 힘줄을 장착해 물속 환경 변화에 따라 꼬리지느러미의 강성을 조절할 수 있게 했다. 그 결과 순항 속도 조절은 물론 느리게 움직일 때도 안정적 자세 제어가 가능하고 장애물도 빠르게 피할 수 있다는 것을 확인했다.

스위스 로잔연방공과대(EPFL) 제공

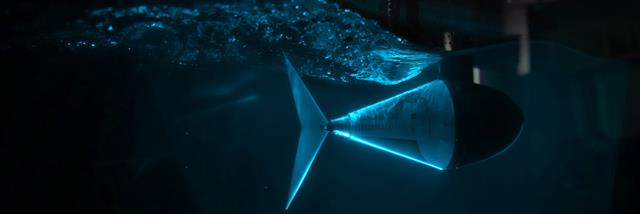
칠성장어를 모방해 만든 로봇 물고기 ‘아그나타X’. 칠성장어는 가장 원시적인 어류인 만큼 연구진은 로봇 물고기로 구현하기도 가장 용이하다고 판단했다.
스위스 로잔연방공과대(EPFL) 제공
스위스 로잔연방공과대(EPFL) 제공
스위스 로잔연방공과대(EPFL), 로봇공학기업 KM 로보타, 프랑스 IMT 아틀랑티크, 미국 하버드대, 일본 도호쿠대, 캐나다 셔브룩대 공동연구팀은 칠성장어를 흉내낸 로봇 물고기 ‘아그나타X’를 개발하고 연구 논문을 발표했다.
연구팀은 어류 중에 가장 원시적이고 단순한 무악류를 모방했다. 일반적으로 어류는 운동신경과 감각신경을 연결해 주는 중심패턴발생기(CPG)를 갖고 있다. CPG는 서로 다른 근육이 활성화되는 순서를 결정해 이동을 제어할 수 있게 해 준다. 칠성장어는 다른 물고기들과 똑같은 신경 시스템을 갖추고 움직이지만 좀더 모방이 쉬운 단순한 형태를 갖고 있다. 칠성장어의 척수와 비슷한 내부압력센서, 물의 흐름과 세기를 감지하는 외력센서, CPG처럼 이들 센서에서 감지된 정보를 종합해 움직임을 만드는 인공위성발진기로 구성된 아그나타X는 물의 상태 변화를 빠르게 감지하고 그에 맞게 뱀장어처럼 헤엄치는 것이 관찰됐다.

미국 버지니아대 제공
과학자들은 참치의 움직임을 모방한 로봇 물고기 ‘튜너봇’을 만들었다. 사진은 튜너봇을 만들기 전 참치 꼬리지느러미와 물의 움직임에 대해 컴퓨터 시뮬레이션한 장면.
미국 버지니아대 제공
미국 버지니아대 제공
2021-08-12 23면
Copyright ⓒ 서울신문 All rights reserved. 무단 전재-재배포, AI 학습 및 활용 금지




































